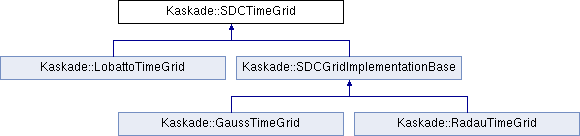
Abstract base class of time grids for (block) spectral defect correction methods. More...
#include <sdc.hh>
Detailed Description
Abstract base class of time grids for (block) spectral defect correction methods.
This class represents a time grid on \( [a,b]\) with \( n \) subintervals and \( n+1 \) time grid points (including \( t_0=a\), but \( t_n \le b\)). Polynomial interpolation, quadrature, and differentiation are provided using (a subset of) the grid points as nodes.
Conceptually, the collocation polynomials are defined by Lagrange (or Hermite) interpolation of their values at the initial point \( t_0 \) and \( n \) collocation points (nodes) \( t_1,\dots,t_n \). Grid points may coincide, in which case Hermite interpolation is used. Collocation conditions for \( \dot u = f(u) \) are to be satisfied only at the nodes, i.e. \( \dot u(t_i) = f(u(t_i)), \quad i=1,\dots,n\).
Public Types | |
| typedef Dune::DynamicVector< double > | RealVector |
| The type used for real vectors. More... | |
| typedef DynamicMatrix< double > | RealMatrix |
| The type used for real (dense) matrices. More... | |
Public Member Functions | |
| virtual RealVector const & | points () const =0 |
| Time points in the time step. More... | |
| double | point (int k) const |
| Time points in the time step. More... | |
| virtual RealMatrix const & | integrationMatrix () const =0 |
| Integration matrix \( S \). More... | |
| virtual RealMatrix const & | differentiationMatrix () const =0 |
| Differentiation matrix \( D \). More... | |
| virtual void | refine (RealMatrix &p)=0 |
| Perform refinement of the grid, filling the prolongation matrix. More... | |
| virtual RealMatrix | interpolate (RealVector const &x) const =0 |
| Compute interpolation coefficients. More... | |
Member Typedef Documentation
◆ RealMatrix
| typedef DynamicMatrix<double> Kaskade::SDCTimeGrid::RealMatrix |
◆ RealVector
| typedef Dune::DynamicVector<double> Kaskade::SDCTimeGrid::RealVector |
Member Function Documentation
◆ differentiationMatrix()
|
pure virtual |
Differentiation matrix \( D \).
This computes a matrix such that polynomials given by values at \( t_0, \dots,t_n\) can easily be differentiated.
The Lagrangian interpolation functions \( L_k \) are defined by \( L_k(t_i) = \delta_{ik} , \quad i=0,\dots,n\). The matrix \( D \in \mathbb{R}^{n+1\times n+1}\) contains the values
\[ D_{ik} = \dot L_k(t_i) \]
This way, if \( u \) is defined in terms of its function values \( v_i = u(t_i) \), its derivatives can be evaluated by a matrix-vector multiplication:
\[ \dot u(\tau_i) = (Dv)_i \]
Implemented in Kaskade::SDCGridImplementationBase, and Kaskade::LobattoTimeGrid.
Referenced by Kaskade::waveformRelaxationStep2().
◆ integrationMatrix()
|
pure virtual |
Integration matrix \( S \).
This computes a matrix such that functions given by values at \( t_0,\dots,t_n\) can be easily integrated.
Interpolation is based on the nodes \(t_0\dots,t_n\). Depending on the actual implementation, the initial point \( t_0 \) might be ignored (i.e. have a quadrature weight of 0).
The Lagrangian interpolation functions \( L_k \) are defined by \( L_k(t_i) = \delta_{ik},\quad i=1,\dots,n \). The matrix \( S \in \mathbb{R}^{n\times n+1}\) contains the values
\[ S_{ik} = \int_{\tau=t_i}^{t_{i+1}} L_k(\tau) \, d\tau \]
(the leading column being zero). This way, if \( u \) is defined in terms of its function values \( v_i = u(t_i),\quad i=1,\dots,n \), the integrals can be evaluated by a matrix-vector multiplication:
\[ \int_{\tau=t_i}^{t_{i+1}} u(\tau) \, d\tau = (Sv)_i \]
Implemented in Kaskade::SDCGridImplementationBase, and Kaskade::LobattoTimeGrid.
Referenced by Kaskade::sdcExEulerIterationStep(), and Kaskade::sdcIterationStep2().
◆ interpolate()
|
pure virtual |
Compute interpolation coefficients.
Returns a matrix \( w \in \mathbb{R}^{m+1\times n+1} \), such that the interpolation polynomial \( p \) to the values \( y_i \) at grid points \( t_i \) can be evaluated as
\[ p(x_i) = \sum_{j=0}^n w_{ij} y_j, \quad i=0,\dots,m. \]
Implemented in Kaskade::LobattoTimeGrid, Kaskade::RadauTimeGrid, and Kaskade::GaussTimeGrid.
◆ point()
|
inline |
◆ points()
|
pure virtual |
Time points in the time step.
The time step \( [t_0, t_n] \) contains \( n+1 \) time points \( t_i \), including the end points. Those are provided here. The time points are stored in increasing order.
Implemented in Kaskade::SDCGridImplementationBase, and Kaskade::LobattoTimeGrid.
Referenced by Kaskade::EulerSDC< Vector, TimeGrid >::integrate(), Kaskade::EulerSDC< Vector, TimeGrid >::integrateTOL(), point(), Kaskade::sdcExEulerIterationStep(), Kaskade::sdcIterationStep2(), Kaskade::Sdc< Vector >::setInitialValue(), and Kaskade::waveformRelaxationStep2().
◆ refine()
|
pure virtual |
Perform refinement of the grid, filling the prolongation matrix.
If the function representation is not sufficiently accurate, a finer grid of time points can be tried. This method refines the grid to \( m+1 \) time points \( s_i \), \( m>n \), and fills a prolongation matrix \( P\in \mathbb{R}^{m+1\times n+1} \) such that with \( v_i = u(t_i) \) and \( w=Pv \) it holds that \( w_i = u(s_i) \).
Different derived classes may implement this in different ways, or provide their own, more flexible ways of refining the grid.
- Parameters
-
[out] p the prolongation matrix
Implemented in Kaskade::LobattoTimeGrid, Kaskade::RadauTimeGrid, and Kaskade::GaussTimeGrid.
The documentation for this class was generated from the following file: